There are two different ways you will use your Gizmo. The Driver’s Station configuration determines which environment the Gizmo is operating in.
Practice Mode Environment
Competition Mode environment
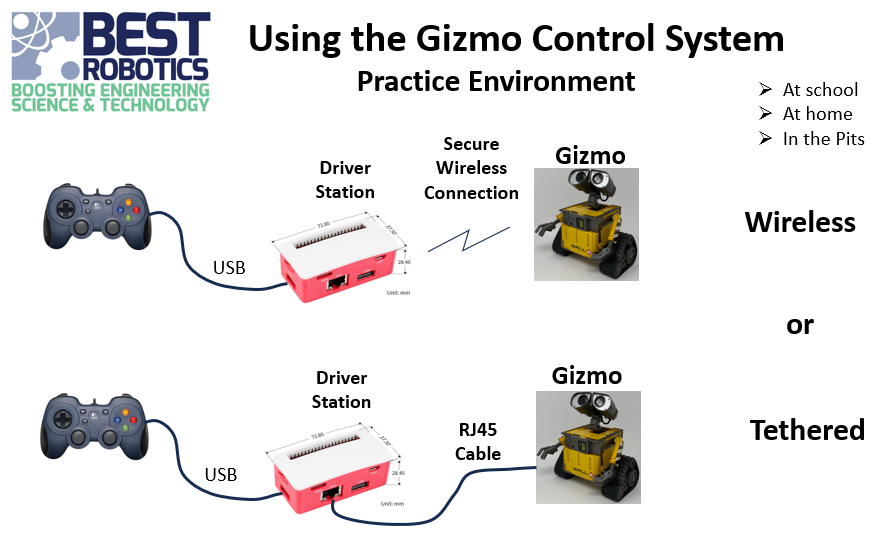
Practice Environment
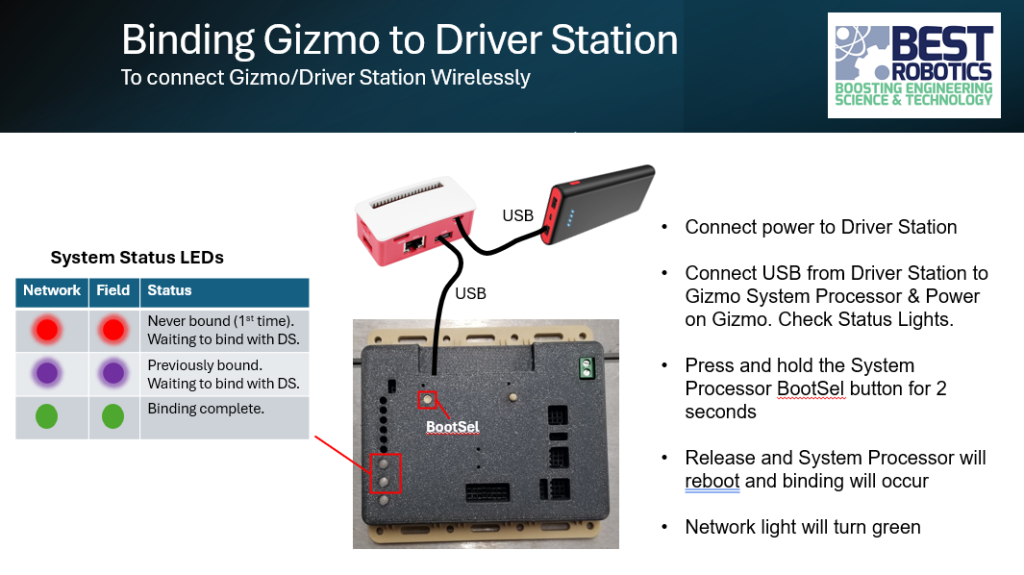
By default, all Driver’s Stations are configured to operate in the Practice Mode. In this mode, the Driver’s Station can be bound to any Gizmo board to enable wireless communication between the two. The binding operation involves powering the Driver’s Station, then connecting a USB cable between the Driver’s Station and the Gizmo board System Processor.
There is no need to power the Gizmo with the 7.2v robot battery. The USB power from the Driver’s Station will be sufficient for the binding process.
When the binding is complete, the Gizmo’s Network status light will turn green. You may then remove the USB cable from both devices.
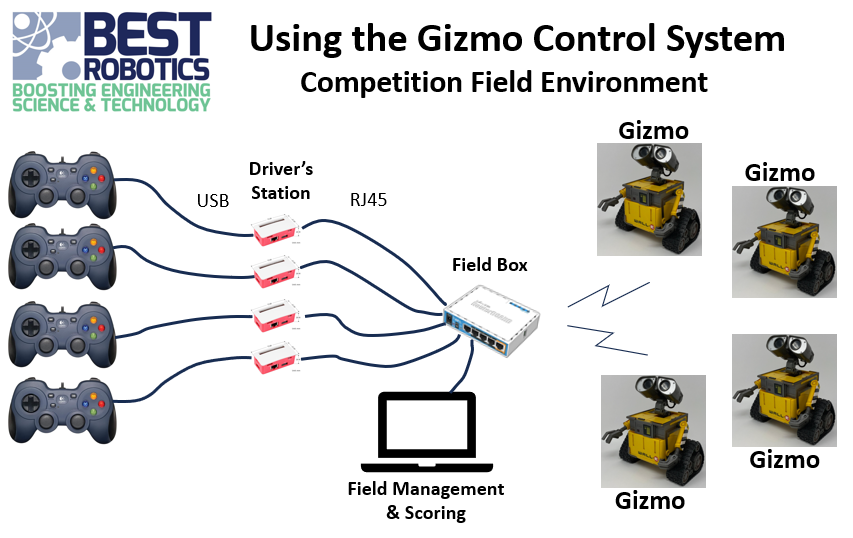
Competition Environment
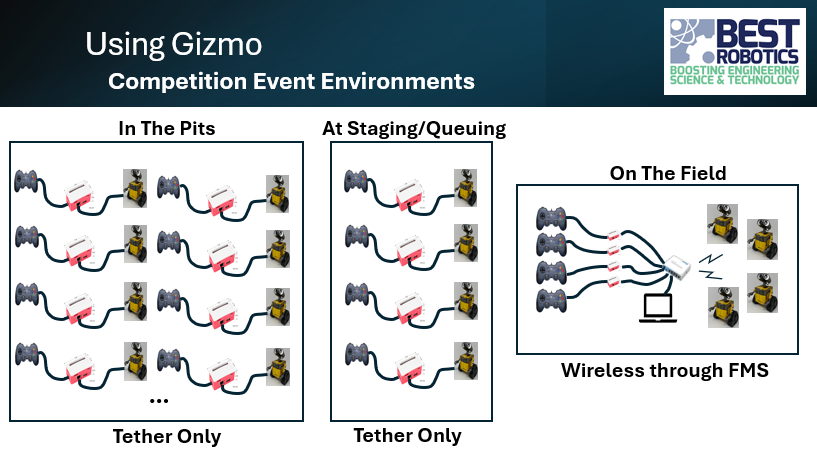
At a BEST Competition, during the robot compliance check, compliance personnel will reconfigure the Driver’s Station to communicate wirelessly with the competition field.
From this point on, you will use Tethered Practice Mode only when not participating on the competition field.
At the competition field, bring your Joystick/Driver’s Station/Battery combo and plug the RJ45 cable at the field into the Driver’s Station. This will enable the wireless communication between your Driver’s Station and robot during match play. It is the only time you will drive your robot wirelessly at the competition.
How to Connect Components for Each Environment
Watch the video to see how to connect your Gizmo and Driver’s Station for the different operating environments.